-
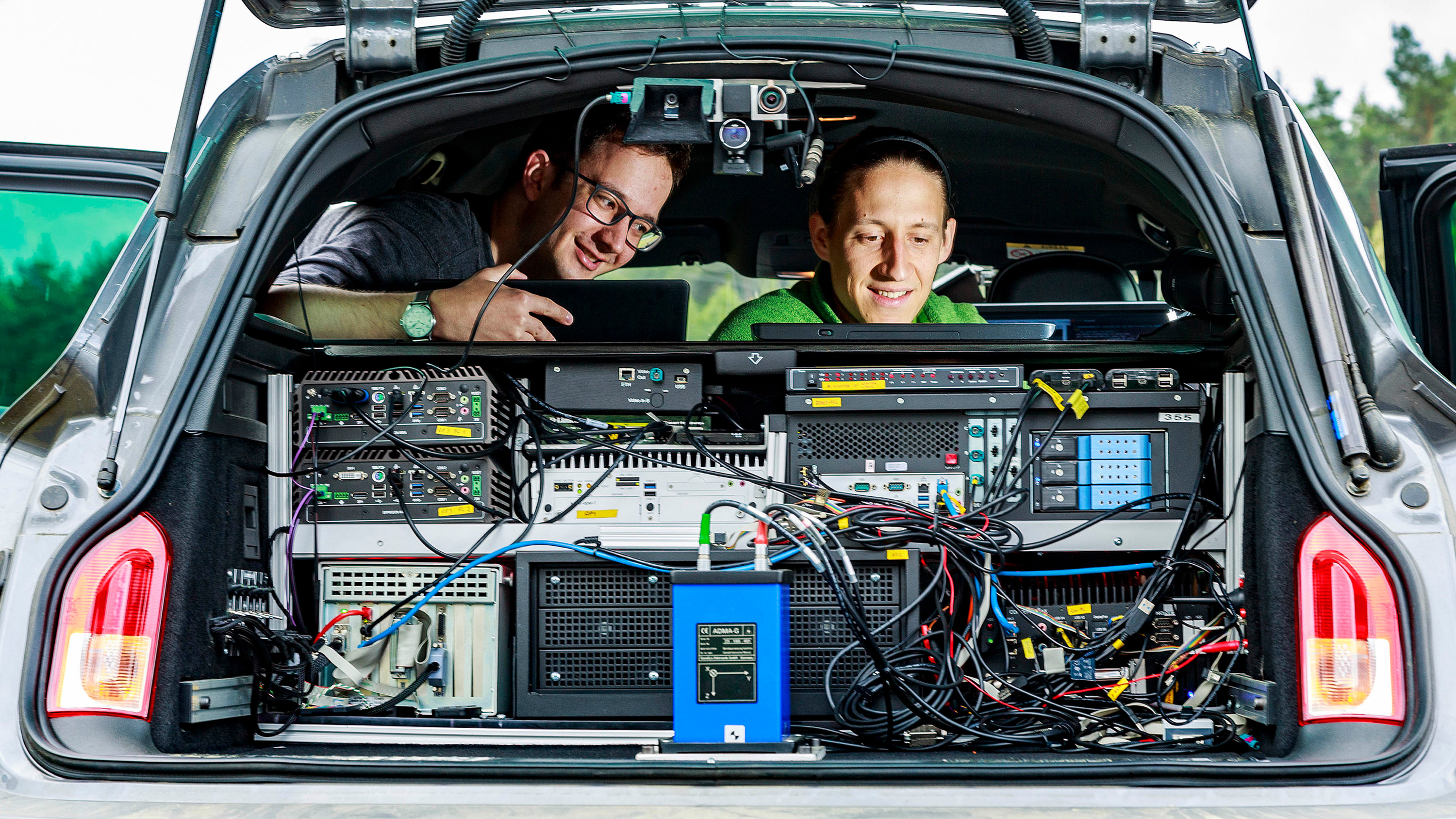
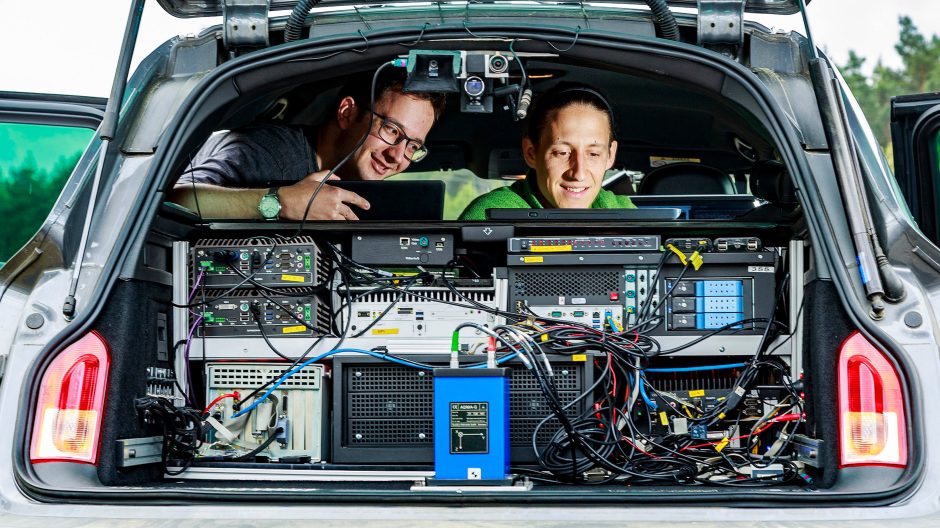
- Das Versuchsfahrzeug, ein Insignia Sports Tourer, ist gespickt mit Kameras und Sensoren. Im Kofferraum türmen sich Rechner zur Kommunikation, Lokalisierung und zur Echtzeit-Berechnung von Fahrmanövern.
Das autonome Fahren wird Wirklichkeit. Lediglich die Vorhersagen zum Zeitpunkt schwanken stark. Wann die autonomen Autos endgültig das Steuer übernehmen, das wissen auch Florian Jomrich und Maximilian Harr nicht. Doch dass dies eher früher als später geschieht, dazu leisten die Opel-Doktoranden ihren Beitrag. An diesem Dienstagvormittag sammeln sie im Opel Test Center Dudenhofen Daten. Jede Menge Daten. Das Versuchsfahrzeug, ein Insignia Sports Tourer, ist gespickt mit Kameras und Sensoren. Im Kofferraum türmen sich Rechner zur Kommunikation, Lokalisierung und zur Echtzeit-Berechnung von Fahrmanövern.
DIE BASIS: DIGITALE KARTEN
Die Arbeit der Doktoranden ist Teil des Projekts Ko-HAF. Mit diesem Forschungsvorhaben unternimmt Opel den nächsten wesentlichen Schritt zum autonomen Fahren – das hochautomatisierte Fahren bei höheren Geschwindigkeiten bis 130 km/h. Dabei muss der Fahrer die Fahrt nicht permanent überwachen, allerdings das Steuer bei Bedarf mit einer gewissen Zeitreserve übernehmen können. Um diesen potenziellen Eingriff durch den Menschen, etwa im Fall einer Baustelle oder eines Unfalls, sicher und komfortabel zu ermöglichen, werden zentimetergenaue, digitale Streckenkarten benötigt. Das Fahrzeug nutzt diese Kartendaten um seine eigenen Sensor- und Umgebungsinformationen abzugleichen und in zuverlässige, selbstständige Fahrmanöver umzuwandeln – oder aber in ein Signal, das den Fahrer auf die Übernahme vorbereitet.

Forschungsallianz: Florian Jomrich (links) und Maximilian Harr begleiten als Doktoranden bei Opel die Entwicklung zum hochautomatisierten Fahren.
DOKTORANDEN
BEI OPEL
Sie stellen Grundsätzliches infrage, steigern die Innovationskraft des Unternehmens, gestalten die Zukunft der Branche: In einer losen Serie stellen wir Doktoranden bei Opel vor und beleuchten ihr wissenschaftliches Forschungsthema. Aktuell arbeiten 19 Opel-Doktoranden an ihrer Dissertation. Neun von ihnen gehören zur Abteilung Advanced Technology E/E, die von Dr. Nikolas Wagner geleitet wird.

Das Insignia-Versuchsfahrzeug unterwegs auf dem Opel Test Center.
Das Ko-HAF-Projekt
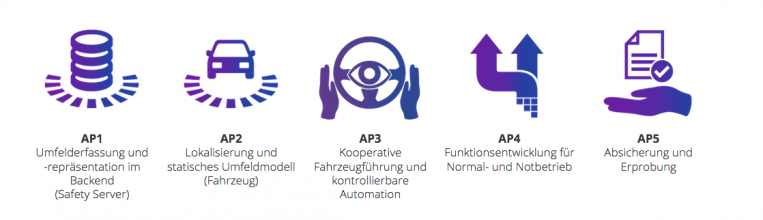
Während die erste Generation des hochautomatisierten Fahrens (HAF) den niedrigen Geschwindigkeitsbereich in einfachen Verkehrssituationen wie dem Autobahnstau adressiert, soll die zweite Generation den höheren Geschwindigkeitsbereich auf gut ausgebauter Verkehrsinfrastruktur beherrschen. Die Abkürzung Ko-HAF steht für kooperatives hochautomatisiertes Fahren. Mit kooperativ ist die Interaktion von hochautomatisierten Fahrzeugen mit einem so genannten Safety Server gemeint. Bei dem Konsortialprojekt, das in fünf Arbeitspakete unterteilt ist (siehe unten), werden Technologien entwickelt und getestet. Projektpartner sind Automobilhersteller, Zulieferer und wissenschaftliche Institute. Dr. Stefan Berger agiert als Projektleiter für die Opel Automobile GmbH und leitet das Arbeitspaket 4 auf Konsortialebene.

Hochautomatisiertes Fahren bedeutet: Der Fahrer muss die Fahrt nicht permanent überwachen, allerdings die Steuerung bei Bedarf mit einer gewissen Zeitreserve übernehmen können.
IN FÜNF STUFEN
Der Weg vom manuellen zum autonomen Fahren verläuft in fünf Stufen: Beim assistierten und teilautomatisierten Fahren muss der Fahrer die Fahrt dauerhaft überwachen, auch wenn das System das Gasgeben und Bremsen und/oder das Lenken übernimmt. Beim hochautomatisierten Fahren muss der Fahrer bei Bedarf nach einer angemessenen Zeit das Fahrzeug übernehmen können. Wenn der Passagier im Auto zu keiner Zeit der Fahrt mehr eingreifen muss, spricht man vom vollautomatisierten Fahren.
Der Lösungsansatz des Ko-HAF-Projekts: Fahrzeuge unterschiedlicher Partner kommunizieren über ein System, den sogenannten Safety Server. „Zum Beispiel speisen die Autos die Umfeldwahrnehmung ihrer eigenen Onboard-Sensorik in das gemeinschaftliche System ein“, erläutert Florian Jomrich. „In dem Server werden die Informationen gesammelt, ausgewertet und sinnvoll zusammengefasst. So erhalten die Fahrzeuge nahezu in Echtzeit die digitale Karte, die mit aktuellen Verkehrsinformationen angereichert ist und für hochautomatisiertes Fahren benötigt wird“, ergänzt Maximilian Harr. Daher haben die angehenden Doktoranden etwa bei Versuchsfahrten auf einem Autobahndreieck rund um Frankfurt umfangreiche Umgebungsdaten „eingefahren“. Diese dienten als Grundlage, neue Algorithmen zur selbstständigen Aktualisierung des Kartenmaterials im Safety Server zu entwickeln.
DIE SCHWARMINTELLIGENZ
„In Arbeitspaket 1 kümmern wir uns unter anderem um die vorausschauende Bereitstellung der Kartendaten“, erklärt Jomrich, der in Darmstadt Informationssystemtechnik studiert hat. Der angehende Doktor hat schon seine Masterarbeit bei Opel geschrieben, ebenfalls über vernetztes Fahren. „Zehn Sekunden Zeit sollen dem Fahrer bleiben, um bei einer entsprechenden Meldung des Systems das Lenkrad wieder übernehmen zu können“, so der 28-Jährige. „Entsprechend schnell und sicher müssen die Daten vom Server zum Fahrzeug fließen, die die hochauflösenden Karten liefern.“ Diese Reaktionsfrist lässt sich bei geringeren Geschwindigkeiten natürlich leichter gewährleisten als bei höheren. „Im Geschwindigkeitsbereich von 130 km/h ist die digitale Karte ein wichtiges Feature.“ Zum reibungslosen Datenaustausch ist dabei ein absolut störungsfrei arbeitendes Kommunikationssystem von entscheidender Bedeutung.

Im September findet an zwei Tagen die Abschlusspräsentation des Ko-HAF-Projekts auf dem Gelände des Opel Test Centers in Dudenhofen statt.

Darauf bereiten sich die Doktoranden intensiv vor. Das Versuchsfahrzeug soll zum Beispiel eine Wanderbaustelle detektieren und diese Information an den Safety Server melden.
Im Fokus des Arbeitspakets 2, das Maximilian Harr mitbetreut, stehen die statischen Umfeld-Daten, die vom Fahrzeug gesammelt werden – die Spur- oder Schildererkennung etwa. Denn das selbstständig fahrende Fahrzeug soll nicht allein von den angelieferten Daten der hochauflösenden Karten abhängig sein. Über verschiedenste Sensorik, wie beispielsweise ein Kamerasystem, werden Spurmarkierungen und andere sogenannte „Landmarken“ über ein Zeitfenster gesammelt und zu einem lokalen Ausschnitt kartiert, der dann mit der serverseitigen Karte verglichen werden kann. Dabei gilt es, die Unsicherheit der Sensorik zu schätzen und Sensorausfälle robust zu detektieren. „Ein neues Kartenstück muss nicht von teuren Messfahrzeugen kartiert werden, sondern kann über eine Vielzahl von Serienfahrzeugen kostengünstig erzeugt werden“, erklärt Harr, der ein Maschinenbau-Studium an der TU Karlsruhe absolviert hat. Die Doktorandenstelle war an seinem Lehrstuhl in Karlsruhe ausgeschrieben. Das Thema hatte ihn sofort begeistert – denn es ist „das Spannendste, das die Automobilindustrie zurzeit zu bieten hat.“
ABSCHLUSSDEMOS stehen bevor
Bereits im September stehen im Opel Test Center Dudenhofen die Abschluss-Demos zum laufenden Projekt bevor. „Und da wollen wir dafür sorgen, dass unser Versuchsfahrzeug eine beeindruckende Performance liefert – unbedingt“, erläutert Florian Jomrich, während er auf der Teststrecke die Hände vom Lenkrad nimmt und entspannt in den Schoß legt.
DIE BETREUER
Doktorand Maximilian Harr wird von Prof. Christoph Stiller, Karlsruhe Institute of Technology (KIT), betreut, Florian Jomrich von Prof. Ralf Steinmetz, Fachgebiet Multimediakommunikation der TU Darmstadt. Bei Opel in Rüsselsheim werden die beiden von Dr. Nikolas Wagner und Dr. Steffen Knapp unterstützt.
Stand August 2018