-
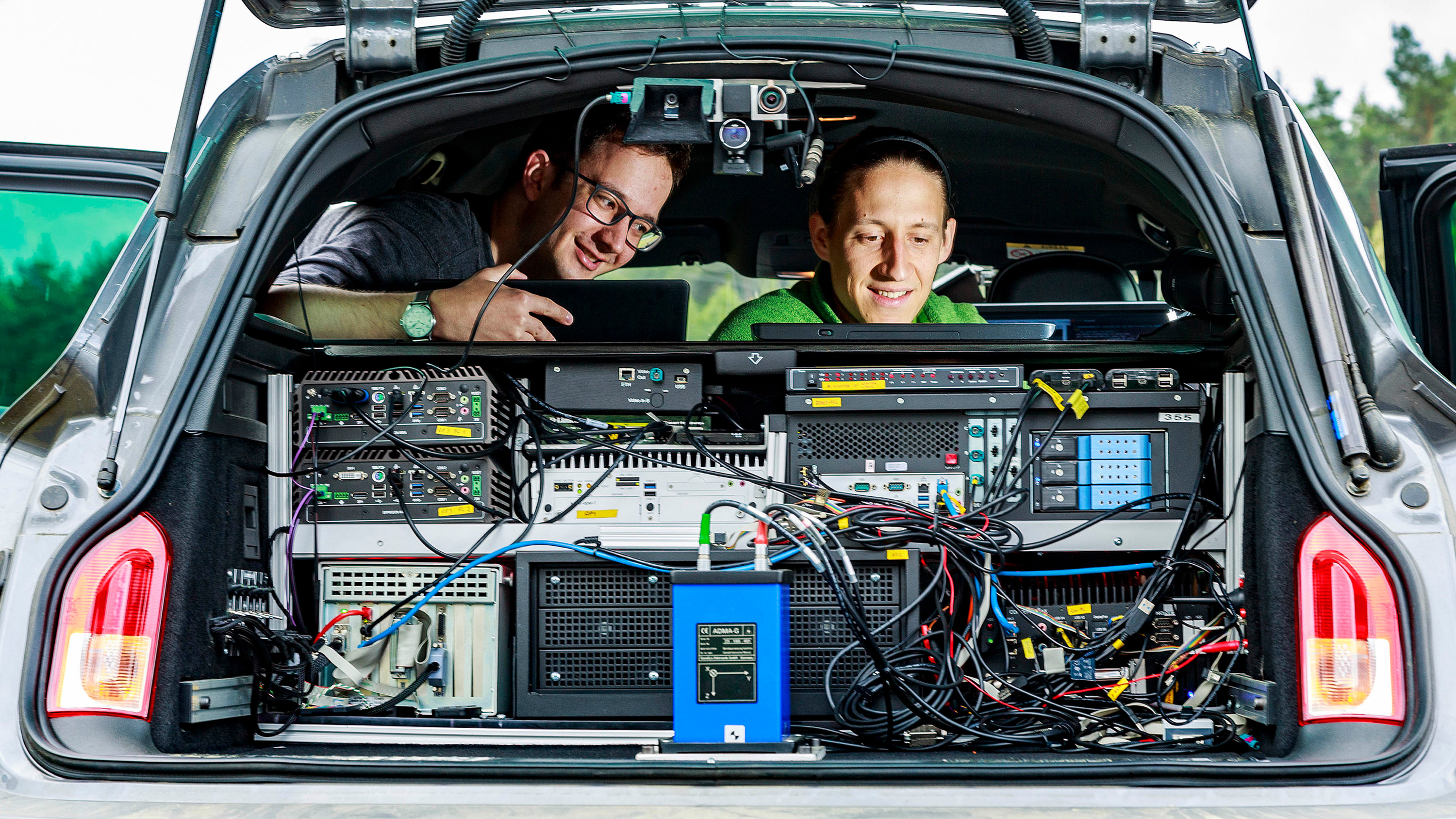
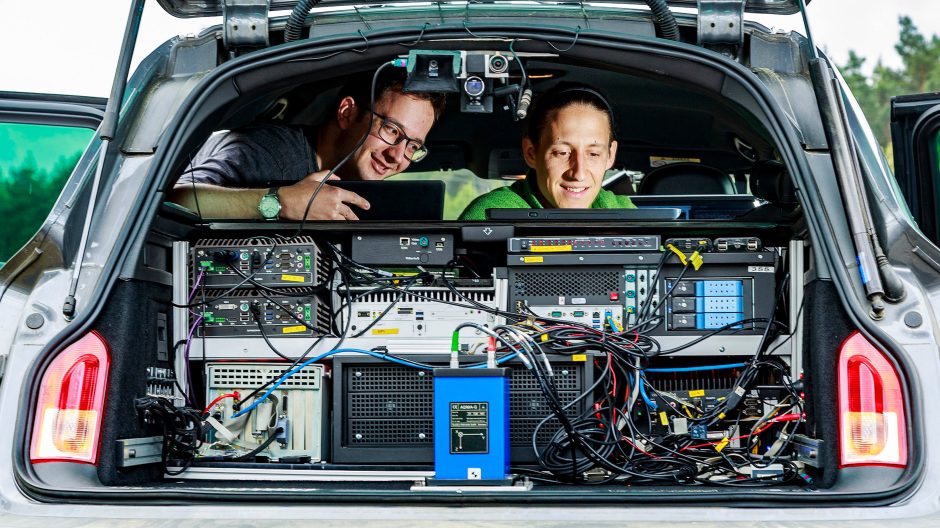
- Das Versuchsfahrzeug, ein Insignia Sports Tourer, ist gespickt mit Kameras und Sensoren. Im Kofferraum türmen sich Rechner zur Kommunikation, Lokalisierung und zur Echtzeit-Berechnung von Fahrmanövern.
There is no doubt that autonomous driving will become a reality. But predictions as to when it will happen vary wildly. Florian Jomrich and Maximilian Harr don’t know when autonomous cars will take over driving duties once and for all either. But the two students, both of whom are working towards their PhD’s at Opel, are doing their part to ensure that it will be sooner rather than later. On this particular Tuesday morning we find them at the Opel Test Center gathering data. Lots of data. The test vehicle, an Insignia Sports Tourer, is armed with an array of cameras and sensors. In the trunk a battery of computers handles communications, records the vehicle’s location, and calculates driving maneuvers in real time.
THE FOUNDATION: DIGITAL CARDS
The work the two PhD candidates are doing is part of the Ko-HAF (Cooperative Highly Automated Driving) project. For Opel, this research represents the next significant step towards autonomous driving – highly automated driving at increased speeds of up to 130 kph. The driver does not have to monitor the journey constantly, but they do need to be able to take the wheel with time to spare if required. Making this potential human intervention (for example in the event of road work or an accident) as safe and easy as possible requires digital road cards, which provide a picture of the road ahead that’s accurate to within a centimeter. The vehicle reconciles the data from these cards with the information from its own sensors and surroundings and converts them either into reliable, independent maneuvers, or into a signal to alert the driver that they should take over.

The research alliance: PhD candidates Florian Jomrich (left) and Maximilian Harr are contributing to the development of autonomous driving at Opel.
PhD CANDIATES
AT OPEL
They question basic principles, boost the company’s innovation capability, and shape the industry’s future. In this occasional series, we introduce you to PhD candidates at Opel and shed light on their scientific research. There are currently 19 candidates working on their theses at Opel. Nine of them are attached to the Advanced Technology E/E Department led by Dr. Nikolas Wagner.

The Insignia test vehicle on the road at the Opel Test Center.

What is ‘highly automated driving’? The driver does not have to monitor the journey constantly, but must be able to take the wheel with time to spare if required.
A FIVE-STAGE PROCESS
The journey from manual to autonomous driving is a five-stage process: In assisted and partially assisted driving, the driver has to monitor the journey constantly, even if the system is applying the gas, brakes, and/or steering. In highly automated driving, the driver has to be able to take control of the vehicle within a reasonable period of time. Only when the passenger in the car no longer has to intervene at all can fully automated driving be said to have been achieved.
So how does the Ko-HAF project work? Vehicles from a range of partners communicate using a single system, known as the Safety Server. “For example, the cars save what their own on-board sensors are sensing about their surroundings in the shared system,” Florian Jomrich explains. “The data is then collected, assessed, and arranged in a way that makes sense on the server. This means the vehicles receive the digital card they need for autonomous driving, including up-to-date traffic information, almost instantaneously,” adds Maximilian Harr. That’s why the two soon-to-be PhD graduates have gone the extra mile; for instance, to collect comprehensive data in test drives around a freeway junction near Frankfurt. That data provided the basis for new algorithms allowing the material on the cards to be updated independently on the Safety Server.
SWARM INTELLIGENCE
“In the first batch of work, one of the areas we are concentrating on is how to provide the card data in advance,” explains Jomrich, who studied Information System Technology at Darmstadt. Jomrich, who is soon to be awarded his PhD, previously wrote his Masters dissertation at Opel, also on the topic of connected driving. “The driver should have ten seconds to take control of the steering wheel after the relevant message appears on the system,” the 28-year-old says. “For that to happen, the data that makes up the high-definition cards has to flow quickly and reliably from the server to the vehicle.” Of course it is easier to provide this reaction time at low speeds than at higher ones. “From 130 kph onwards the digital card is an important feature.” To ensure smooth exchange of data, a completely reliable communications system is key.

The final presentation of the Ko-HAF project will take place over two days in September at the Opel Test Center in Dudenhofen.

The two PhD students are working hard to prepare. For example, the test vehicle should be able to detect moving road work and relay this information to the Safety Server.
The second batch of work, in which Maximilian Harr is involved, focuses on the static surroundings data the vehicle collects, such as for recognizing lane markings or signs. After all, the self-driving vehicle is not designed to rely solely on data from the high-definition cards. Various sensors, such as a camera system, collect lane marking and other so-called ‘landmark’ data over a given time period, building up a picture of a specific section of road. This section can then carded and compared with the card on the server. The key here is to estimate uncertainty in the sensor readings and develop a robust process for detecting sensor failures . “You don’t need expensive measuring equipment to card new sections; you can do it cost-effectively using a variety of standard production vehicles,” Harr explains. He previously studied Mechanical Engineering at the Karlsruhe Institute of Technology The PhD researcher’s post was first advertised by his department in Karlsruhe. He was immediately enthused by the topic, which is “the most exciting thing in the automotive industry at the moment.”
FINAL DEMONSTRATIONS COMING SOON
The final demonstrations for the ongoing project will take place at the Opel Test Center at Dudenhofen as early as this September. “By then we want to make sure that our test vehicle can deliver really impressive performance – definitely,” Florian Jomrich explains, taking his hands off the steering wheel and placing them casually in his lap.
THE SUPERVISORS
PhD candidate Maximilian Harr is supervised by Prof. Christoph Stiller at the Karlsruhe Institute of Technology (KIT). Florian Jomrich’s supervisor is Prof. Ralf Steinmetz from the Multimedia Communications Department at TU Darmstadt. They are supported at the Opel facilities in Rüsselsheim, Germany, by Dr. Nikolas Wagner and Dr. Steffen Knapp.
August 2018